GPS Ant robot
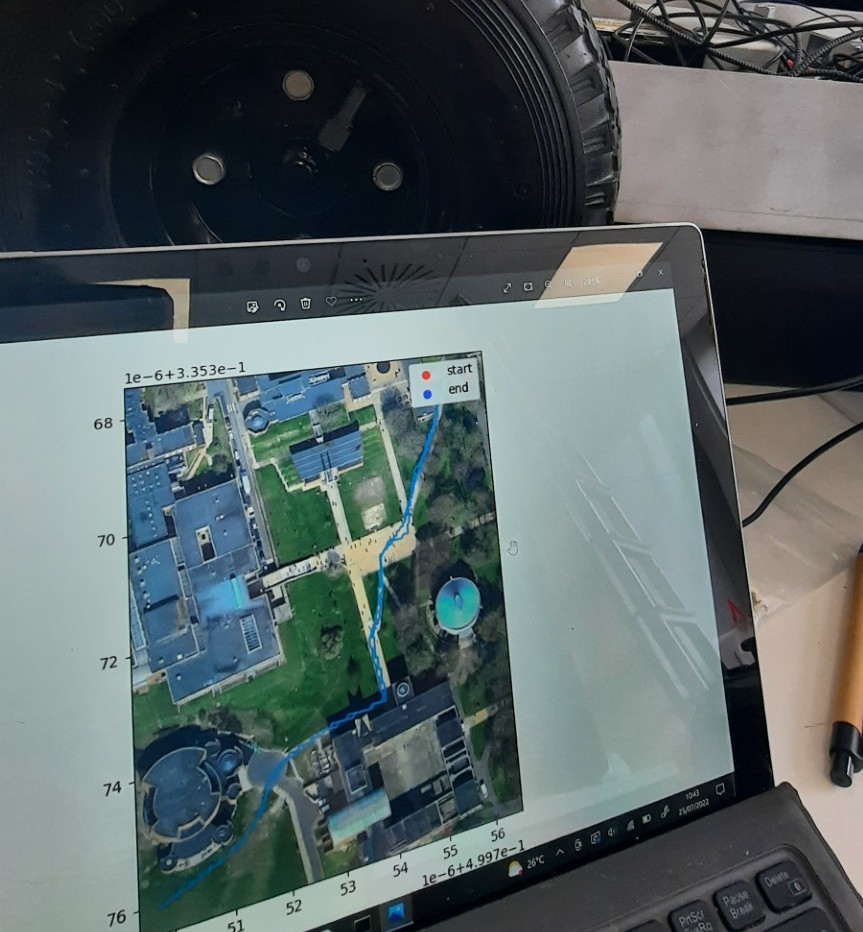
The code can be found here and hereBuilding upon existing work at the University of Sussex into ant navigation, robots had been constructed that can find their way around a path using bio-inspired algorithms. This worked well in a lab set up with fake plants, but how does it work in a much larger and noiser outdoor environment? We set out to build a robot suited to the outfdoor terrain of the South Downs national park. The robot was made of a large metal chassis with 24 V motors. We used a Jetson on the device powered by a 20000 maH battery. We made use of a Jetson Nano running Linux and a long range wifi dongle wired via USB to the Jetson. By creating a local area network on the Jetson, we were able to SSH into the device and control it. The robot would be taken on routes to gather data from the GPS and phone signal correction readings. These signals would be used as a ground truth measurement to see how well the ant navigation algorithms perform.

My role within this project was to build a large chassis that could be used in outdoor terrain, and have the GPS working to a high accuracy.