My interest in AI started off on an Arduino Uno using an SD card. This basic Algorithm of receiveing, checking and learning was to be the baseline of all future versions.
The next version was to use audio input and output. Once this was created, after alot of work, the AI was to learn through physical action using servos and potentiometers. After trying to create these gear boxes to hold the servo and potentiometer, we decided that it would be easier just to solder a wire directly to the servo pot pin. SHEP could then draw input from the servos and save.
SHEP started to get more and more complex on a series of Arduino boards using I2C communication.
There wasn't enough processing power on the Arduino for SHEPs 'brain' so the code moved onto Python.
Python worked well for SHEP.
The system has continued through its development to be fully voice controlled Raspberry Pi's. Hardware development is expensive, but we aim to keep SHEP open source, so all can use.
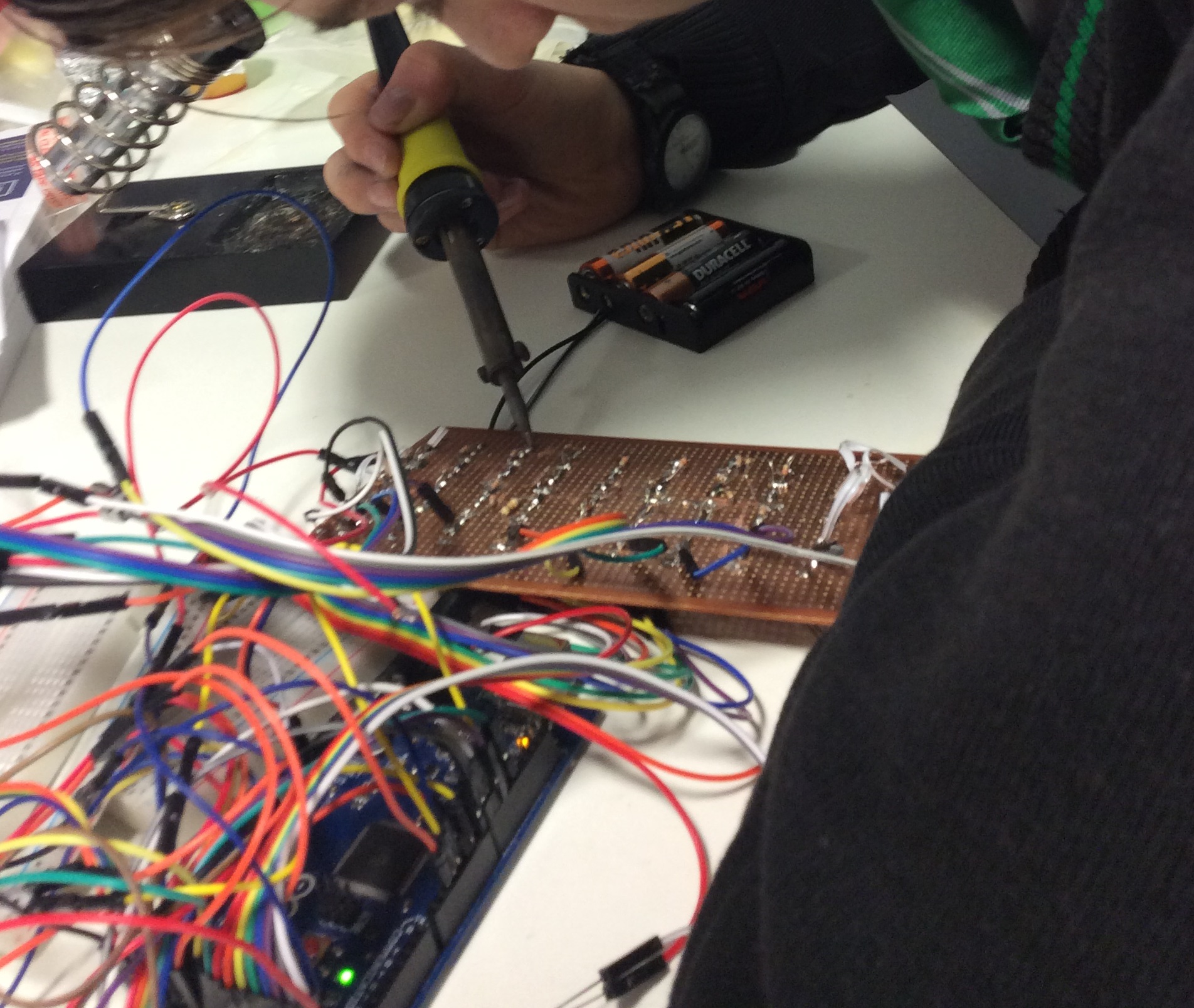
The manual labour included a lot of cuts, bruises, burns and error but SHEP's development team managed to break through and design a computer from nothing. SHEP started off on an arduino board and then became a PCB.
SHEP then had a touchscreen TFT added with its own operating system. All these devices had to be soldered on to the central motherboard of SHEP.
Some of the members of the team took a day of the holidays to assemble the 3D printed hardware. Some of the pictures are above. This was a day of drinking cola, eating pizza and melting plastic together.
This version kept developing from a hypercube-look, to a flat face, to a smaller hypercube and so on... It was until version V0.0.2 when some hardware was drawn up and fit the plans for the system.
The system has had different shapes and sizes. In version 0.0.4 it used a touchscreen with the Raspberry Pi.
This version was later replaced with no GUI, but a voice input and output (version 0.0.5).
From here the system has had different boxes and metal framework built around it,
so it can be mobile. More and more hardware is being developed for different purposes (like the USB SHEP).
Current versions are open to the user's hardware development, as they can use our library. We are still developing robotics.
 Home
About
Downloads
Contact
Home
About
Downloads
Contact