This project started off with developing wireless control over robots which can navigate
terrain.
Nearly all organisms are limited at some point when it comes to movement.
An octopus can fit through holes that are no smaller than its own beak.
We as humans can climb over rocks, but only with a form of grip points for hands
and feet. Environmental barriers define an organism’s
ability to use it. When a path looks too difficult, we will
often choose an easier one.
A Mars Rover is millions of km away from the nearest person to recover it.
It takes over 2 minutes for a signal to get from Earth to Mars. Real-time control on rough terrain
is unrealistic.
We developed several models to make terrain navigation cheaper and easier for robots.
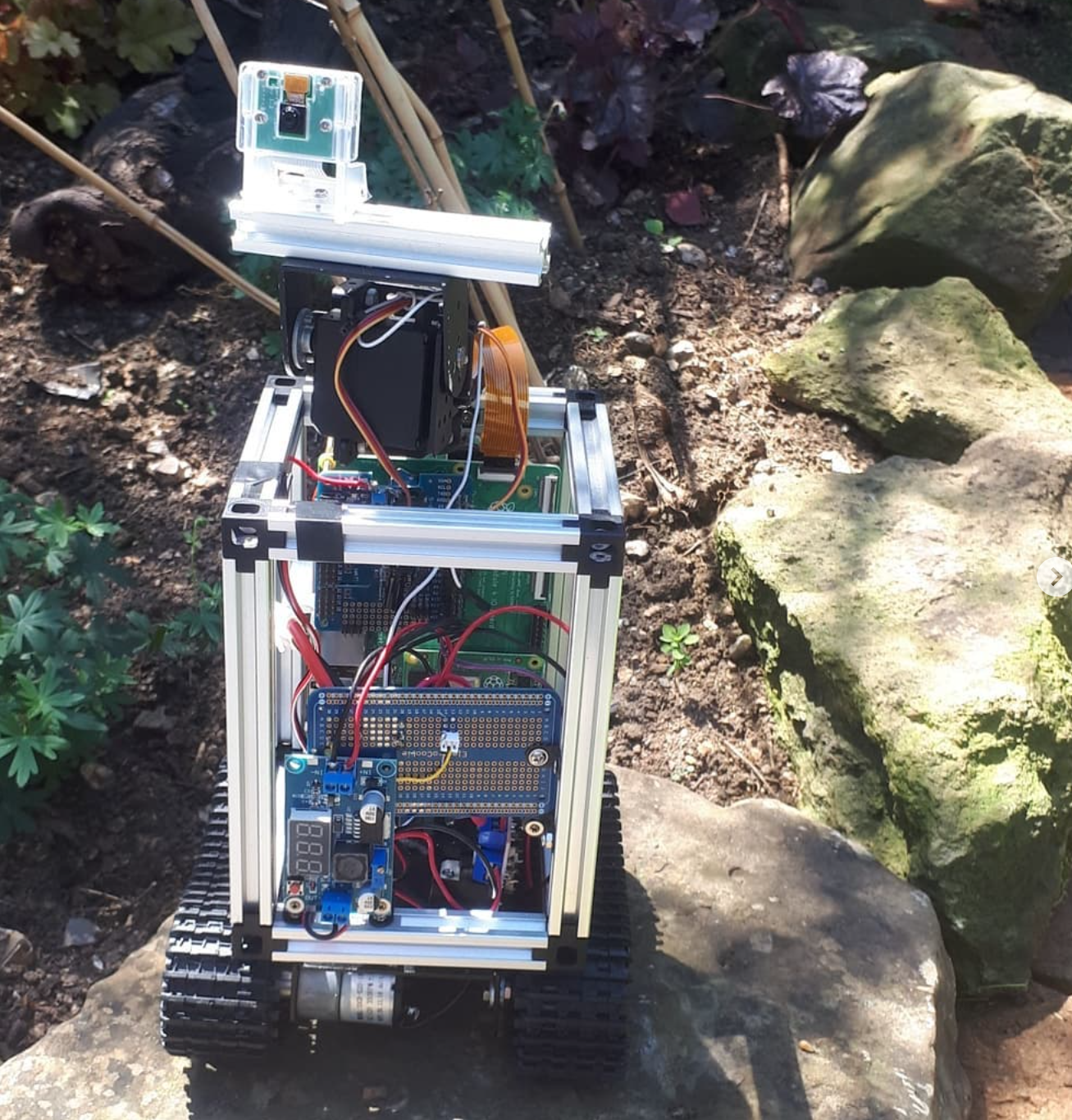
This project was ontrolled with an Xbox remote, then later from another computer over TCP network communication.
Quite a lot of problems we faced was due to battery life. At the beginning of a charge, the robot was able to overcome uneven terrain well. It was top heavy so would only be suited for flatter ground.
This side project was themed around space exploration. The end goal of this robot was to give it arms and ability to interact. This chassis would only be suited to certain flat areas, so would not be ideal for a wide range of tasks that a planetary exploration probe would need.
Further study would be to try out a whegged chassis, or potentially biped chassis for better terrain adaptation.
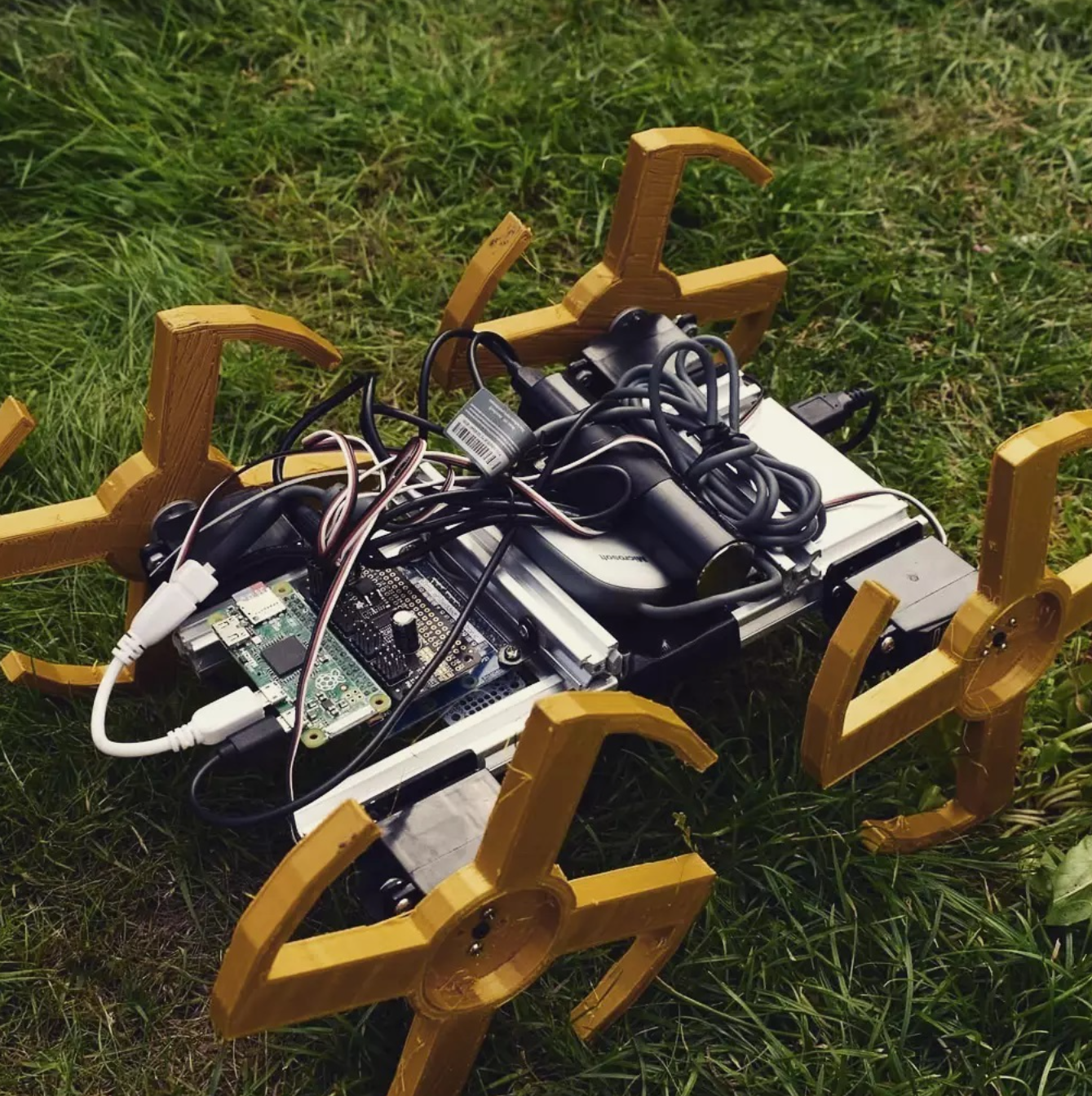
Our whegged chassis, using the Adafruit servo controller and Raspberrypi. It is remote controlled via an #xbox controller.
The wheg is a mix between a leg and wheel, where it provides better terrain adaptation, without using the energy that a biped leg would. This simple, yet effective design is the next step in our planetary exploration project.
The whegs were 3D printed, then we drilled holes to mount the servo brackets before mounting them to 4 continuous rotation servos.
Criticisms of this model was its limitations when going over rough terrain. We wanted to increase climb
by using a back actuator. Inspired off of corckroaches.
Wheg chassis V2 applies suspension to the wheg robot project. In addition to this, we have implemented a back servo to bend the spine. This comes with many teething problems and there is still plenty of work to do.
So far the original wheg chassis (v1) outperformed v2, but this is due to the suspension not being correctly calibrated.
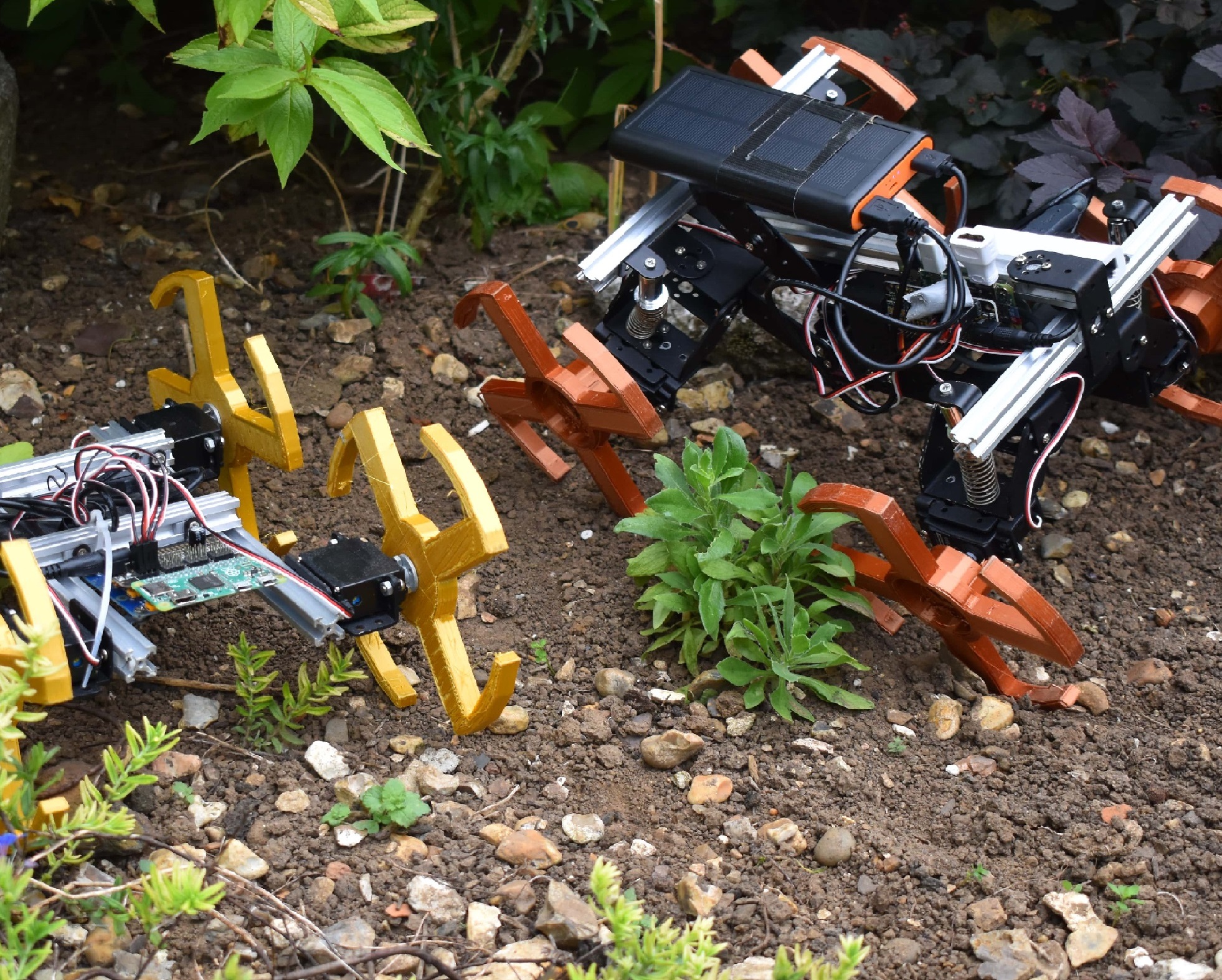
For power we are using a solar recharge duel battery cell. We are experimenting with solar recharging to learn what works and what doesn't with robotics on this scale. So far the battery has worked well and held plenty of charge, meanwhile providing the current and voltage needed for the robot.
Wheg robot v3 is now finished. We added a better rotating system for turning, improved the back balancing with a support servo, redistributed the weight and redesigned the wheg itself.
The new wheg can rotate either way, compared to the previous which would sometimes get caught on objects when reversing.
The back now works better as it helps redistribute weight to the back or front, depending on what is needed when climbing obstacles.
It will be interesting to apply reinforcement learning to see how the robot works out obstacle climbing itself.