Development
Here is a collection of projects of significance I have undertaken. Each project provides overviews of the key points, but more detail can be found in published work, as linked in the pages.
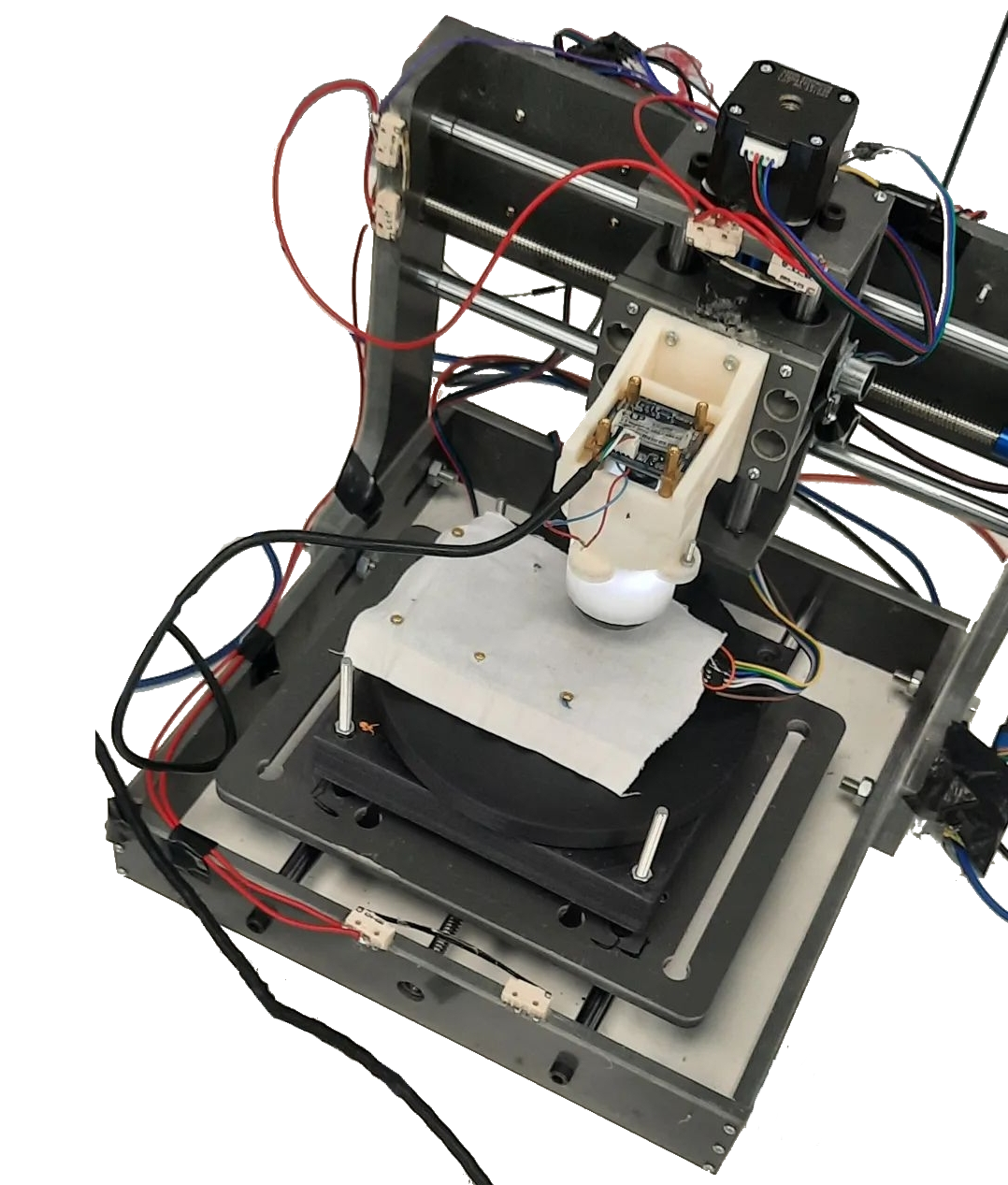
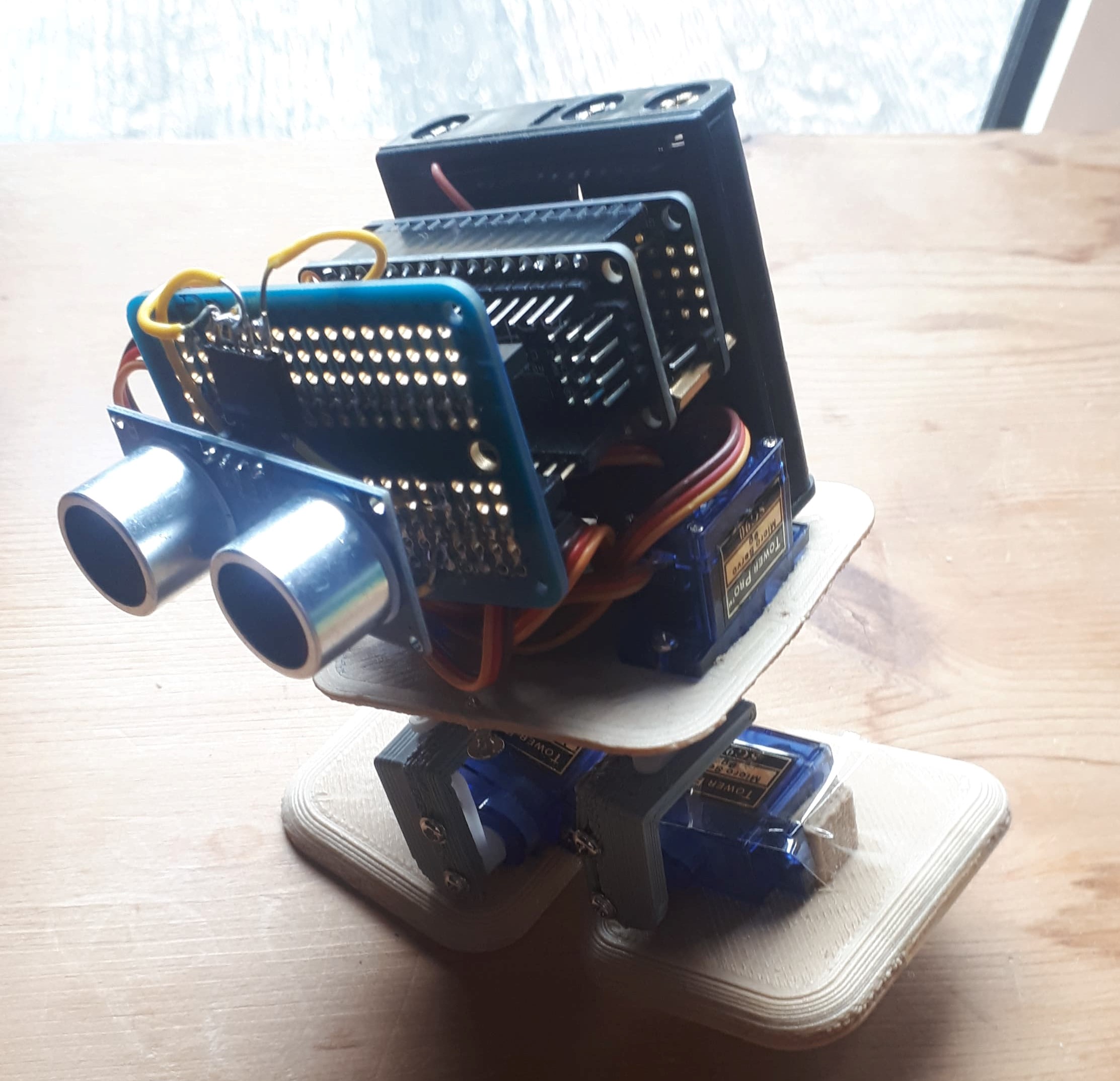
| Tactile ball robot
The project to give tactile perception to a versitile ball robot. |
|
|---|---|
|
TacTip gym
TacTip gym environment with examples of robot bodies, and simply adding the sensor to a chassis. |
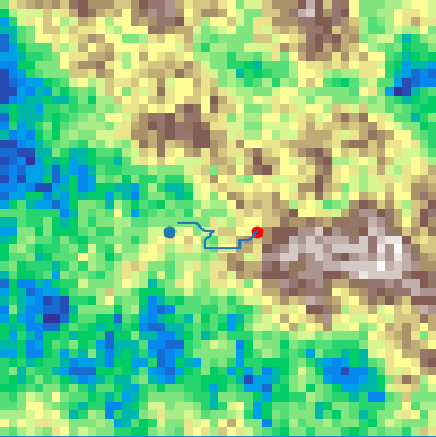
| Ant World
A grid based simulator in Python based on scans for a real ant testing site. |

|
|
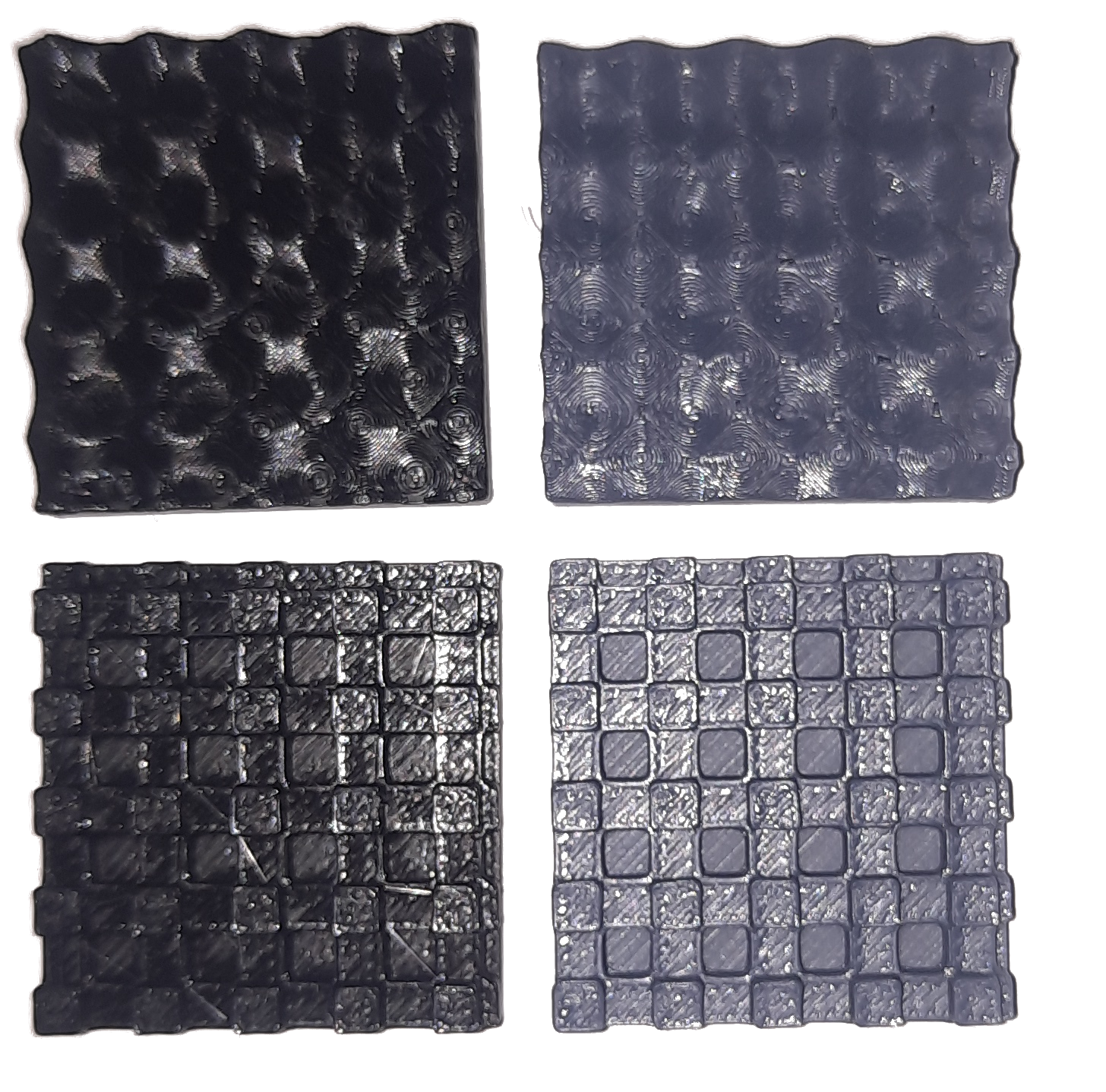
3D printed tactile dataset
Benchmarking tactile texture classification tasks in a replicatable way |
| Texture and friction classifiction
A comparison between the two types of tactile sensors we have worked on |
|
|
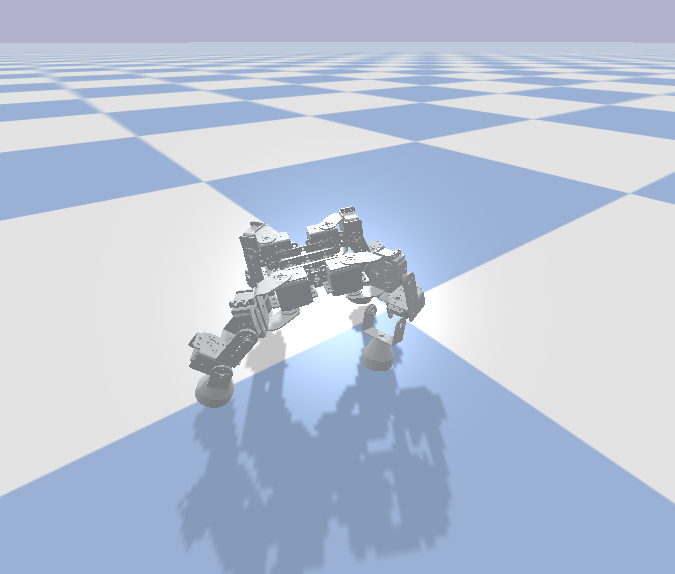
Quadruped evolution
Project for creating a CAD quadruped from scratch and evolving gait controllers |
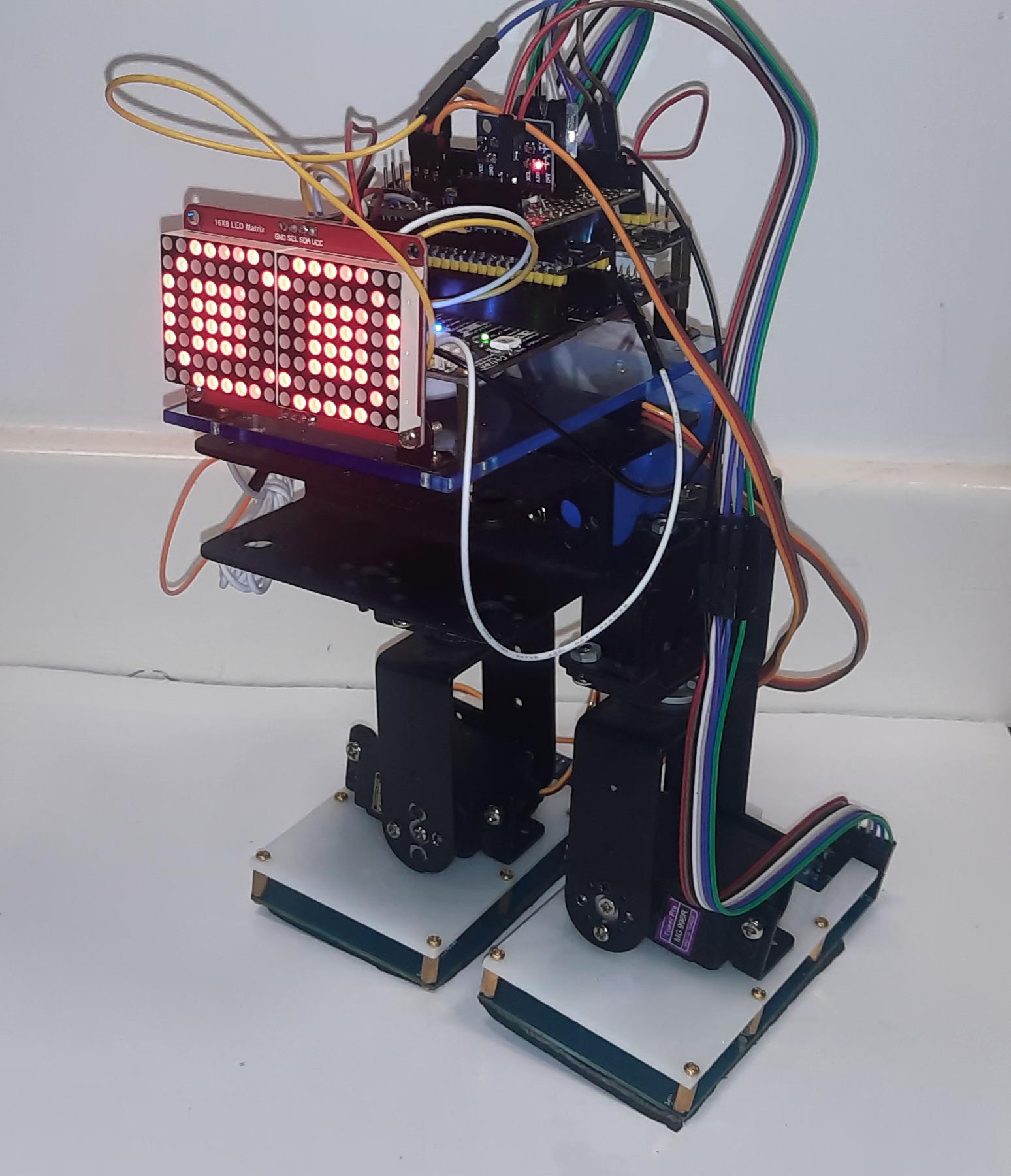
| Tactile Biped
Using the PressTip foot sensor, we were able to gather a dataset of poses and train a model to recognise its 3D orientation based on tactile readings |
|
|
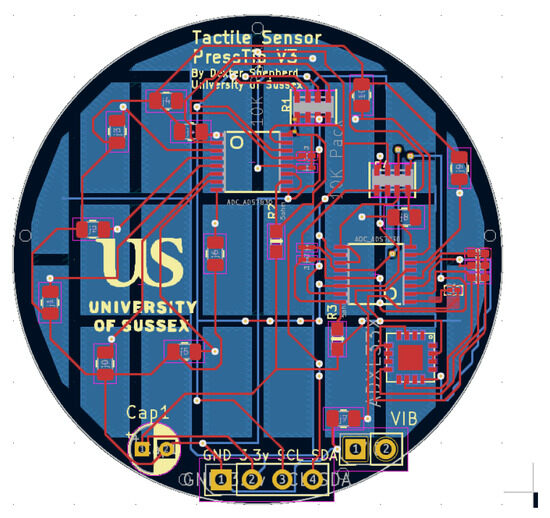
PressTip multimodal sensor
The construction of the PressTip sensor, an electrical multimodal tactile sensor. |
| TacTip construction
The TacTip sensor construction and experimentation across various designs. |
.png)
|

|
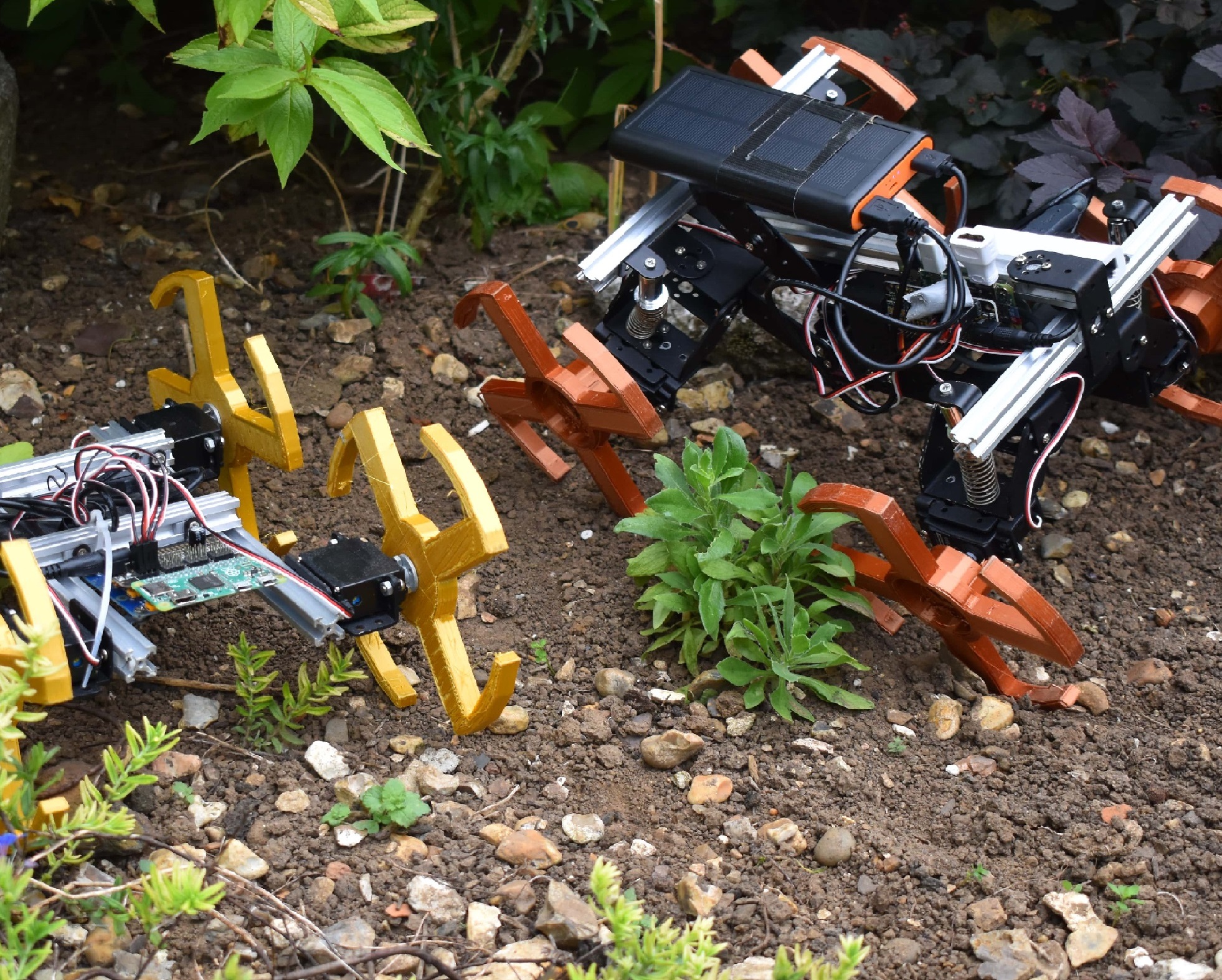
GPS Ant robot
This project worked on constructing a large chassis that could be used for outdoor exploration to test ant inspired algorithms. This project was part of a research assistant role |
| Bio-Inspired Navigation for Varied Terrain
This project uses the Wheg chassis developed in previous projects, however investigates aspects of autonomous navigation behaviours for traversing complex terrain. |
|

|
Deep learning for autonomous navigation on a small robots
This project was part of the University of Sussex Junior Research Associate scheme |
| Genetic algorithm robot walking optimization
Genetic Algorithms use random mutations to within a Genotype which is assessed using a fitness function. In this case fitness being the Genotype which walks the best. |
|
|
Exploring planetary terrain
In this project we explore different hardware options available for space exploration This started as a tracked rover controlled via a network. |